
Interfacing with External Hardware and
Controlling REAL Robots
RobotBASIC is NOT just a simulation language. External hardware can be controlled and manipulated using the PC's I/O ports and devices (serial, parallel, USB, webcams, networks, internet, etc.) Based on the comments and questions we receive, many people are interested in using RobotBASIC in this manner, but need some help getting started. To that end, we have numerous options to provide assistance on a variety of levels as described below. .
Arlo: The Robot You've Always Wanted
This book is now available on Amazon (see the cover below). Watch this Youtube video (also look for PART 2 which shows the arms manipulating objects using vision and sensors) to give you a preview of just a few of the things Arlo will be capable of doing. He was featured in four articles in Servo Magazine (Jan, Feb, Mar, Apr, 2015). You can download Arlo's programming, but know you must have all the hardware configured properly for it to run. See the book for complete details. Note: Many readers have asked for a consolidated parts list. The PDF below provides a GENERAL list.
Enhancing the Pololu 3pi with RobotBASIC
The 3pi robot (see Pololu.com) is a small inexpensive platform worthy of expansion. This book describes the hardware and software needed to add all the major sensors found on our simulated robot (including bumpers, IR object detection, distance measurement, electronic compass, beacon detector, and more). Imagine having a real robot with all these capabilities available to experiment with. The book is now available from Amazon in both standard PRINT and KINDLE formats.
Click one of the links below to read the first chapter. You can also download the source code discussed in the book.
Hardware Interfacing with RobotBASIC
This book provides the background needed for our more advanced books. Don't think of this as a book for beginners though. In addition to interfacing fundamentals it also covers such topics as voice recoginition, voice synthesis, vision, and communication and control over the Internet. For those interested in the Arduino processors, this PDF provides some additional examples.
hardwareinterfacingsourcecode.zip
Compressed archive in ZIP format [258.2 KB]
Click to buy Hardware Interfacing on Amazon
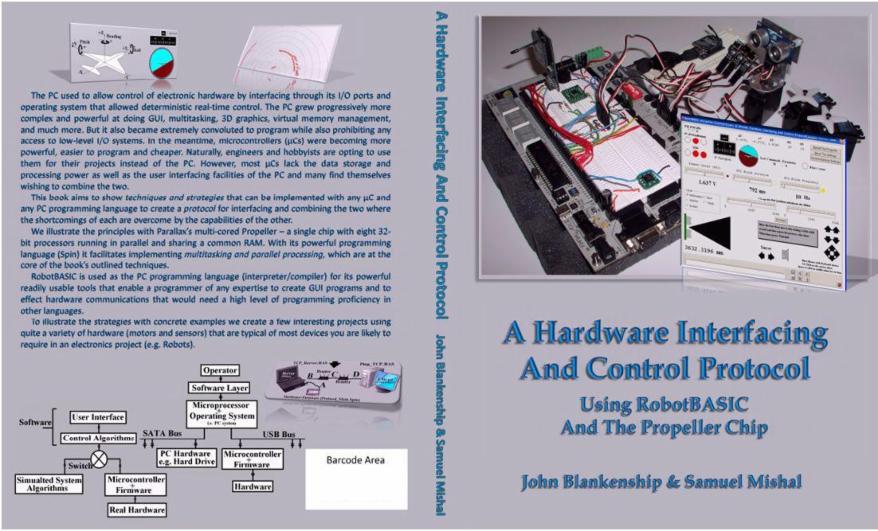
A Hardware Interfacing and Control Protocol
This book utilizes the Parallax Propeller Chip as the basis for an indepth study of interfacing a wide variety of peripherals with RobotBASIC. It emphasizes developing a protocol
that makes it easy to modify and expand the system. A small paperback or ebook is also available that shows how some of the examples in this book can be implemented on a Arduino
processor.
Buy this book from Amazon
Interfacing the Arduino with a PC using RobotBASIC's Protocol
A small paperback and low-cost ebook are available on Amazon.com that demonstrate some of the principles in the above book, but on the Arduino processor. The source code for the Arduino book
can be downloaded below.
RobotBASIC Projects for the Lego NXT
The Lego NXT robot provides a hardware platform perfect for those without an electronics background. This book is designed to teach beginners how to program a robot. An
includable LegoLibrary.BAS will be provided that allows the the robot shown below to be controlled from RobotBASIC WITHOUT downloading ANY programs to the NXT
computer. The book will provide numerous projects involving the sound, line, bumper, and ranging sensors.
The links below let you download sample chapters and the source code for the book. You can also download color pictures from the book to make assembly easier.