The RobotBASIC Robot Operating System (RROS)
Scroll past the product descriptions for a summary of the RROS specifications and/or to download the full RROS manual.
Our RROS chip make it easy for hobbyists to build a robot with a full range of sensors. Download the RROS manual for complete information. Note: A printed version of the RROS
Users' Guide is available from us or Amazon.com. The parts on this page are provided to help hobbyists build a wide variety of RobotBASIC compatible Robots. Building a RROS-based
robot is far easier than doing everything from scratch, but it still requires significant skills. A COMPLETE, FULLY-ASSEMBLED and TESTED robot is available for schools on our EDUCATIONAL page.
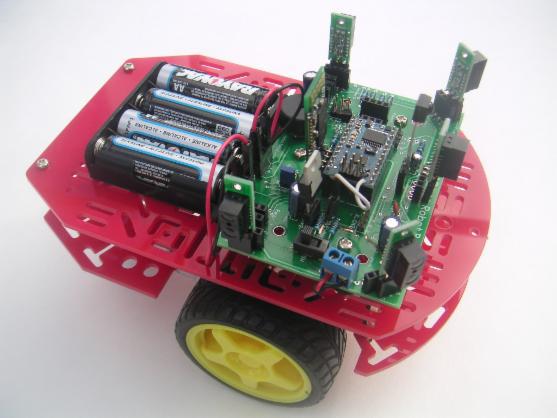
Hobbyists can build their own low-cost chassis or use our RB-9. Here is a link to a YouTube video of the RB-9 chassis in action. The
video also discusses the new RB-PCB and a short program showing how easy it is to build and control a robot with our RROS system. This is a video discussing the RROS chip itself and how we used it in some of our prototypes
SPECIAL SALE
(while current supplies last)
THE RB-9 CHASSIS (normally $99.95) is priced at $29.95 + $20
shipping.
The RB-9 chassis kit includes top/bottom plates, two motors with integrated wheel encoders, all mounting brackets and standoffs, two wheels and the rear caster and is priced at
$99.95 (motors and wheel encoders alone could cost you almost this much). Normally we offer a flat shipping (USA) on all orders of $4.99. If your order includes a chassis though, the
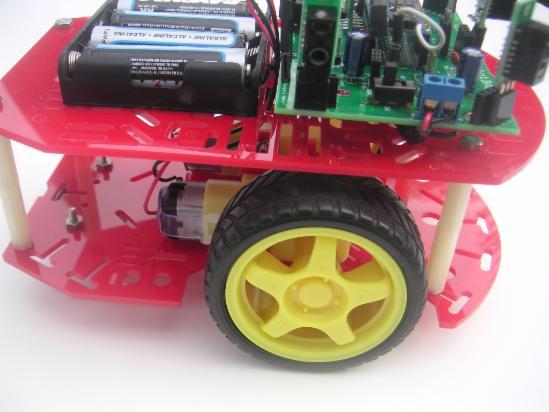
flat shipping rate will be $20 in the states (typically $50 outside the USA). You can see pictures of the chassis below.
Note: The RROS never becomes out-dated. If, in the future, we add new features or support for additional sensors, you can return the chip to us and have it
updated without charge. Early versions did have some minor bugs in some obscure modes, and we have added several performance enhancements so if you have a problem contact us about
updates.
The zip file contains a C file that can be used to understand the
inner workings of the RROS system. It also includes a HEX file
that can be used to program your own chip without re-compiling
the source file.
RROS FILES.zip
Compressed archive in ZIP format [46.5 KB]
Product Descriptions
Here are a few propriatory or hard to find parts to help hobbyists get started. Remember, the RROS system allows you to choose from a WIDE VARIETY of sensors and/or motors. You will also need many parts, cables, and a battery and charger that we do NOT supply with our kits for hobbyists. Everything is supplied with our Fully-Assembled Educational Robot, but we want to keep prices as low as possible for hobbyists that often already have parts on hand and know how to choose what they need from the many options available to them.
RROS Chips are $59.95 (or 2 for $99) – remember the chip provides both the hardware AND the software interface.
If you prefer to burn your own chip
or create your own RROS system,
the source code and HEX file can
be downloaded above (right below the download for the RROS manual).
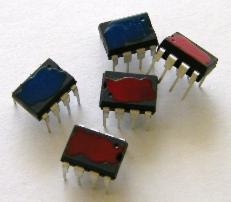
We also have both RED and BLUE (see the manual) Beacon Chips available. They are $12 each or $10 each for 4 or more.

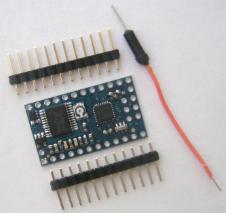
The Bluetooth transceivers we used for all our prototypes are available for $34.95.

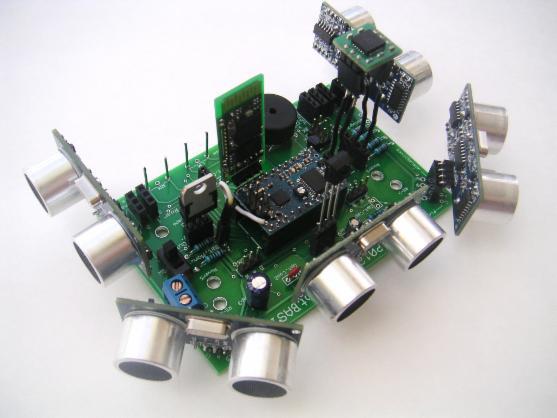
We import these SR04 sonic rangers as a low-cost alternative to Ping and Maxbotic ultrasonic sensors. Their operation is similar but with a different interface. The current
version of the RROS supports using five of these as perimeter sensors. We offer a package of five (without the 5 hoods as shown in the picture below) for $24.95. See the RROS manual for complete
details on using these sensors or any of the many other IR and ultrasonic sensors that are compatible with the RROS system.
Note: We now have the HMC5883 compass complete with a cable to connect it to the RROS board. All 2015 or later RROS chips are compatible. Older chips can be reprogrammed by
us to obtain compatibility. The compass is $29.95.
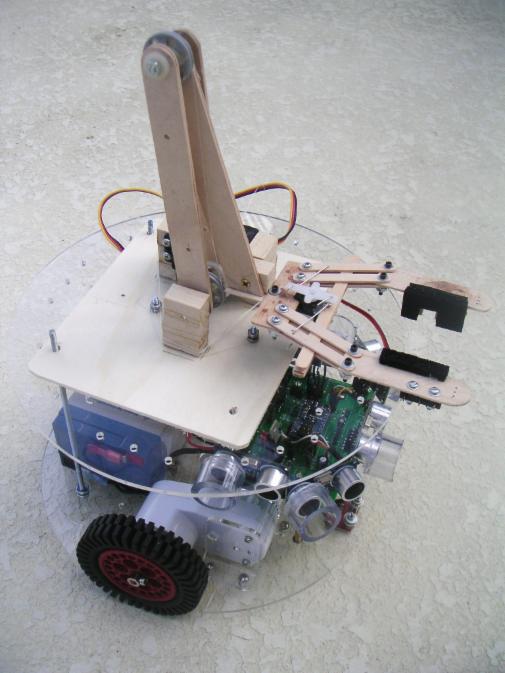
The RB-9 kit allows you to build a chassis that is made from laser-cut acrylic and designed to work with the RB-PCB as shown here (the RB-PCB is NOT included with the kit, order it
separately, see below). The PCB fits between the two plates so that the top can be used for a robot arm or additional sensors or processors (holes are provided for Arduino and Parallax BOE
PCB's). Appendix E of the RROS manual (download below) has complete instructions for assembling the chassis (please read before ordering). The motors have integrated wheel encoders that plug directly
into the RB-PCB. The chassis kit is priced at $99.95.
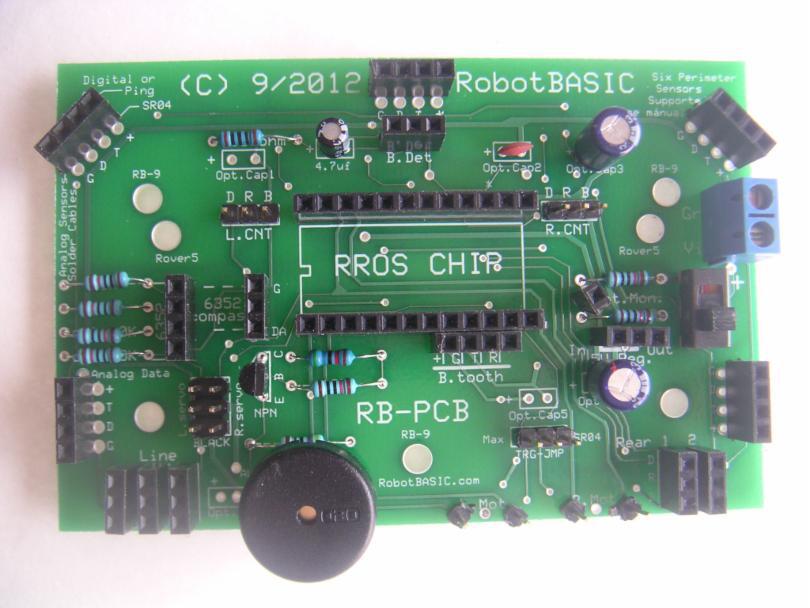
Our new RROS based PC board makes it easy to incorporate our RROS chip into your projects. The board supports most of the sensory modes and a wide variety of sensor types (ultrasonic, IR, digital,
analog, etc). See Appendix D in the RROS Manual for more details on building this board. The board is shown here with the some of the optional parts (see LIST - note, this kit does NOT include
parts such as the compass, battery or line sensors). The board is $15.95 and the optional parts are $34.95. Note: The voltage regulator shipped with the parts kit officially should be used
with a battery supply of 7 volts or higher, although it has worked fine for us with 4.5 AH, 6 volt gel cells (which produce slightly higher than 6 volts). If you are using small batteries
at less than 7 volts (4 standard AA cells for example) you will have problems when they begin to deplete. In such cases, we recommend a low-dropout regulator. We can substitue one in the parts
kit for $3 more for those that need it. To make it easy to create an appropriate supply voltage we offer two AA battery holder options. The 6-cell holder is $4.95 and single cell holders are $1.50
each. If you use rechargable AA cells, remember they only provide about 1.2 volts compared to the 1.5 volts of standard cells so you will need more batteries to keep the supply voltage
between 7 and 12 volts.
HOW TO ORDER:
Send us an email ( RobotBASIC@yahoo.com) specifying:
- The quantity of each item you want and the
- EMAIL address associated with your PayPal account
We will send you a PayPal invoice and ship to your PayPal address.
Note: Remember, when you sign up for PayPal you can simply link it to your charge card making purchasing with PayPal the same as using your card. If you do not want a PayPal
account, they will invoice you and let you pay them directly with a credit card.
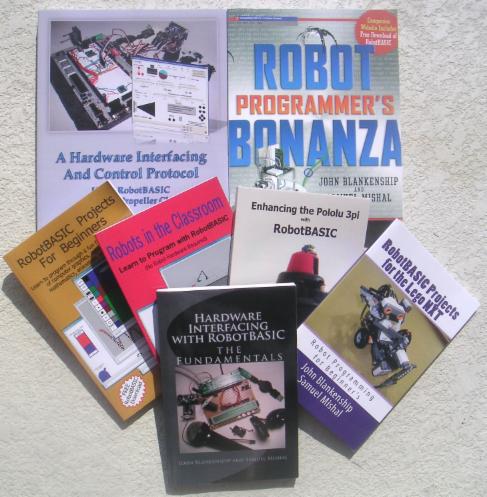
Don't forget we have a wide selection of helpful books available from Amazon. Use this LINK to see them all at Amazon. Detailed descriptions and sample chapters are also available through various pages here at RobotBASIC. Most of these books are available directly from us with quantity discounts.
Populated PCB
Our printed circuit board (see above) makes it even easier to build a RobotBASIC compatible robot. Just add your choice of compatible sensors, our Bluetooth transciever, and a RROS chip and
the electronics for your robot is complete. Nearly all of the motor and sensor modes are supported (download the complete manual below, for more details).
SCROLL TO THE BOTTOM TO SEE CHASSIS OPTIONS
Why a RROS?
In order to intelligently handle a wide variety of generic tasks, a robot’s hardware configuration must include a diverse selection of sensors and I/O capabilities. In the past, building such a
robot has been a daunting task reserved for only those with significant knowledge and skill of both electronics and low-level microcontroller programming.
Now for the price of an interface board alone, hobbyists can have a complete hardware/software solution in the form of a 24-pin IC preprogrammed with the RobotBASIC Robot Operating System
(RROS).
The RROS not only provides the physical interface needed for many motors and sensors, it also provides the software required to seamlessly interface with all supported devices using the high-level
RobotBASIC simulator-based commands and functions. This means that the RROS not only makes it easier than ever before to build a robot, it makes it easier to program one too.
Imagine being able to simply connect a compass to the RROS chip and then immediately determine your robot's orientation with a single programming command such as ANGLE = rCompass(), without ANY
low-level programming. Imagine connecting infrared or ultrasonic sensors directly to the RROS chip to create a Virtual Sensor System capable of determining where obstacles are that might block your
robots path.
Controlling your robot's motors is just as easy as acquiring its sensory information.
When commands like rForward and rTurn are used, your robot won’t just respond, it will respond intelligently, automatically ramping up and down when speeds are changed, using compass readings and
wheel encoder counts when possible and appropriate.
And these examples don’t begin to describe the power of the RROS. Read the complete RROS User's Manual in this PDF and you will discover the real power.... of simplicity. If you
do not have time to read the entire manual (over 200 pages) below is a summary of what to expect.
This YouTube VIDEO shows some of our EARLY prototypes in action.
SUMMARY OF RROS FEATURES
You can connect many devices to the RROS IC as follows:
Some form of Radio Link (such as Bluetooth) or a direct serial link from a PC (if your robot uses an embedded PC on board).
Your motors. The chip will directly drive DC motors up to a max of 1 amp each or continuous rotation servo motors without external support. For bigger motors, the chip will
interface with and control a RoboClaw board allowing control of large (up to 30 amp) motors. The system will automatically slowly increase and decrease the robot’s speed as it starts and stops to
prevent jerky motion. As with other aspects of the system all controlling parameters can be set from RobotBASIC using the rCommand() function.
Some form of wheel counters (single pulse only – full quadrature control is NOT needed). The wheel counters (when present) automatically allow the robot to move specified distances
and rotations more accurately than an open-loop timed response. If wheel counters are not present, there are commands that allow the user to fine-tune the timing loops used to control movements. The
timming approach works far better than you might expect, as long as most of the Robot’s movements are adjusted based on other sensory data. Full control of your robot’s movements is provided through
simulator commands such as rForward and rTurn – all the details are handled by the RROS. Additional commands allow you to fine-tune and modify the movements to increase your robot’s
capabilities.
Perimeter sensors are translated into appropriate rBumper() and rFeel() signals. You may use a wide variety of sensors including, digital IR devices such as Pololu’s Sharp GP2Y0D810
or GP2Y0D805. A more advanced technique is to use analog style sensors so that a VIRTUAL sensory system can be AUTOMATICALLY created for you. The VIRTUAL system utilizes perimeter ranges sensors to
create the data for rRange(), rFeel(), and rBumber(). You can use Ranging IR sensors such as Pololu’s Sharp GP2Y0A21 or GP2Y0A02, or ultrasonic rangers such as the Maxbotix Sonar Sensors or even
Parallax’s PING sensors. Special setup commands allow you to tell the RROS what motors and sensors you are using. In all cases, the data will be collected and translated for use through the
RobotBASIC simulator commands. All of the above sensors are supported even beyond typical expectations. For example, when six PING sensors are used for perimeter sensing, they can be read
simultaneously using a special algorithm – providing superior sensory performance. Great care was taken to support a wide variety of sensors from various manufacturers – ideally you can build a robot
YOUR way and yet all the details are done for you.
Three digital line sensors are supported by the main IC chip. Digital in this case simply means the sensor supplies a logical 1 or 0 as its output. This is true for the Pololu line
sensors that are called "analog" sensors. Their "digital" line sensors use a digital port pin, but actually create an analog result based on the time for a capacitor to discharge,
and are NOT compatible.
A beacon detector such as Pololu’s Vishay TSOP34156 can be used to detect 15 different beacons as described in some of our books.The RROS IC automatically translates all signals so
they can be used through the rBeacon() function. We even offer preprogrammed beacon chips for building your own beacons.
A servo-turret mounted ranging sensor is fully supported when digital perimeter sensing is utilized. It is NOT needed though when VIRTUAL sensors are created from ranging sensors
(see #4 above). When ranging sensors are used, the system automatically extracts both rRange() information and proximity information from the perimeter sensors themselves.
One electronic compass (both the HMC6352 compass module or the HMC5883 are currently supported.
Many other features are present in the RROS. We think advanced hobbyists will find it very versatile. It will, for example, allow you to connect one or more microcontrollers (such as
the Parallax Stamp, arduino processors, or the Pololu Orangutan controllers) to a special serial bus. These controllers can provide camera or GPS data or handle any custom sensory system you
wish. The RROS documentation provides all the details you need to handle normal operations or to customize your system to meet advanced needs. We encourage companies that distribute advanced sensors
to offer RROS compatible versions and we will certainly work with vendors to ensure that RobotBASIC users will have access to a wide variety of options.
The RROS can even be used with steerable robots such as those available from Minds-i (some restrictions apply). Four wheel robots are very stable in outdoor environments
and have advantages over 2-wheel robots in some applications. (Two-wheeled bots like our simulator are much better for the home/office environment).
The RROS chip has a dual personality. When two RROS chips are used together, one of the chips can turn itself into an Arm Expansion that allows RobotBASIC to control 5 servomotors (for shoulder,
elbow, wrist, wrist rotate, and hand open/close) over the standard communication link. The Arm Expansion also provides the ability to acquire additional analog and digital data so that your
arm can have appropriate sensory information (example: pressure at the gripper's fingertips, determining if something is in the hand, etc).

.
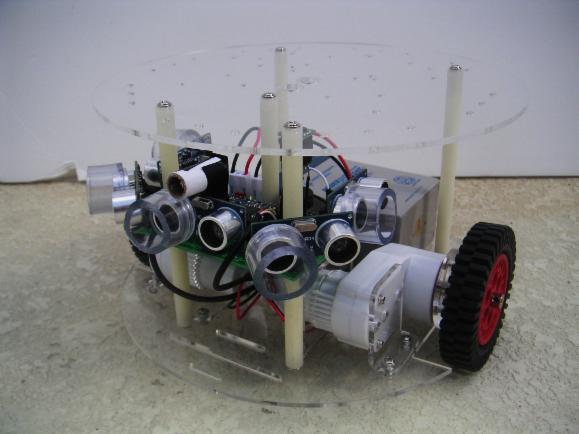
Below are several examples of commercial chassis that can be used with our RROS PCB. First is an early prototype of our RB-9 chassis (RobotBASIC, 9 inch diameter). It is shown
here with a simple robot arm featured in an article published in Servo Magazine.

Our RROS-based PCB also mounts on the Dagu's Rover 5 chassis which provides options for those wanting a tank-style robot (often better for outdoor use). Notice the wood strip to the right of
the battery. It makes everything fit snug and creates a finished look and feel.
IMPORTANT
With these commercially available platforms, the RobotBASIC RROS will become even easier to use. We will be making available #includable libraries for each of the above chassis so that the setup
for your robot will be automatic and painless. We have also begun work on a step-by-step instruction guide for schools that will provide numerous experiments for both simulation and hardware-based
robots at ALL grade levels.
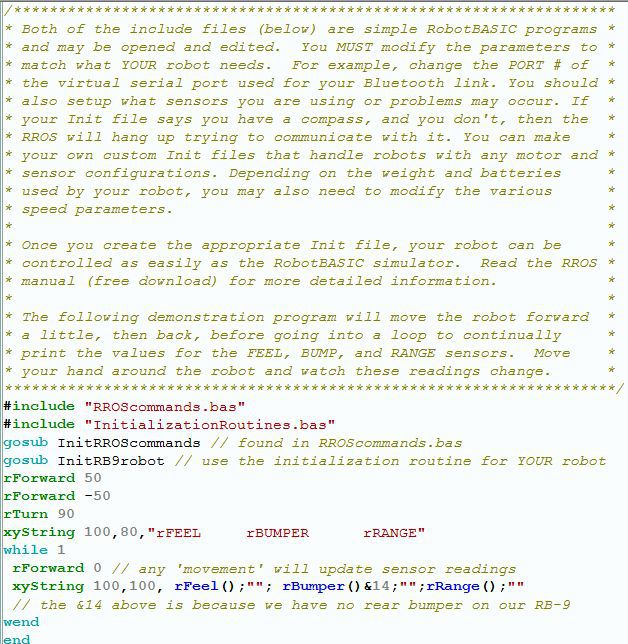
The following program shows how simple it is to control a RROS-based robot (in this case, our RB-9).